
Open Positions @ N-ACXIS Lab
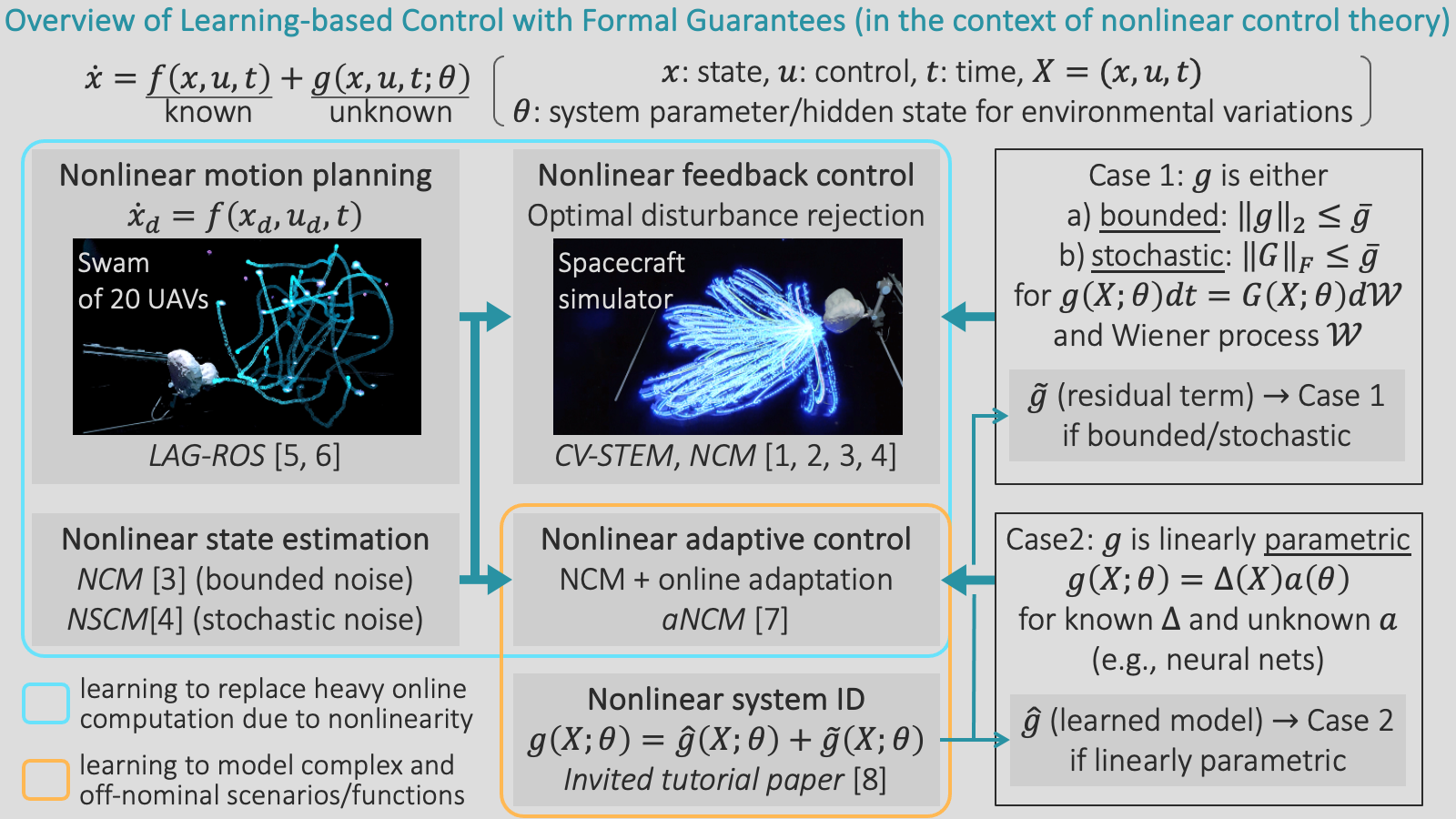
Nonlinear Autonomous Control, Exploration, Intelligence, and Systems
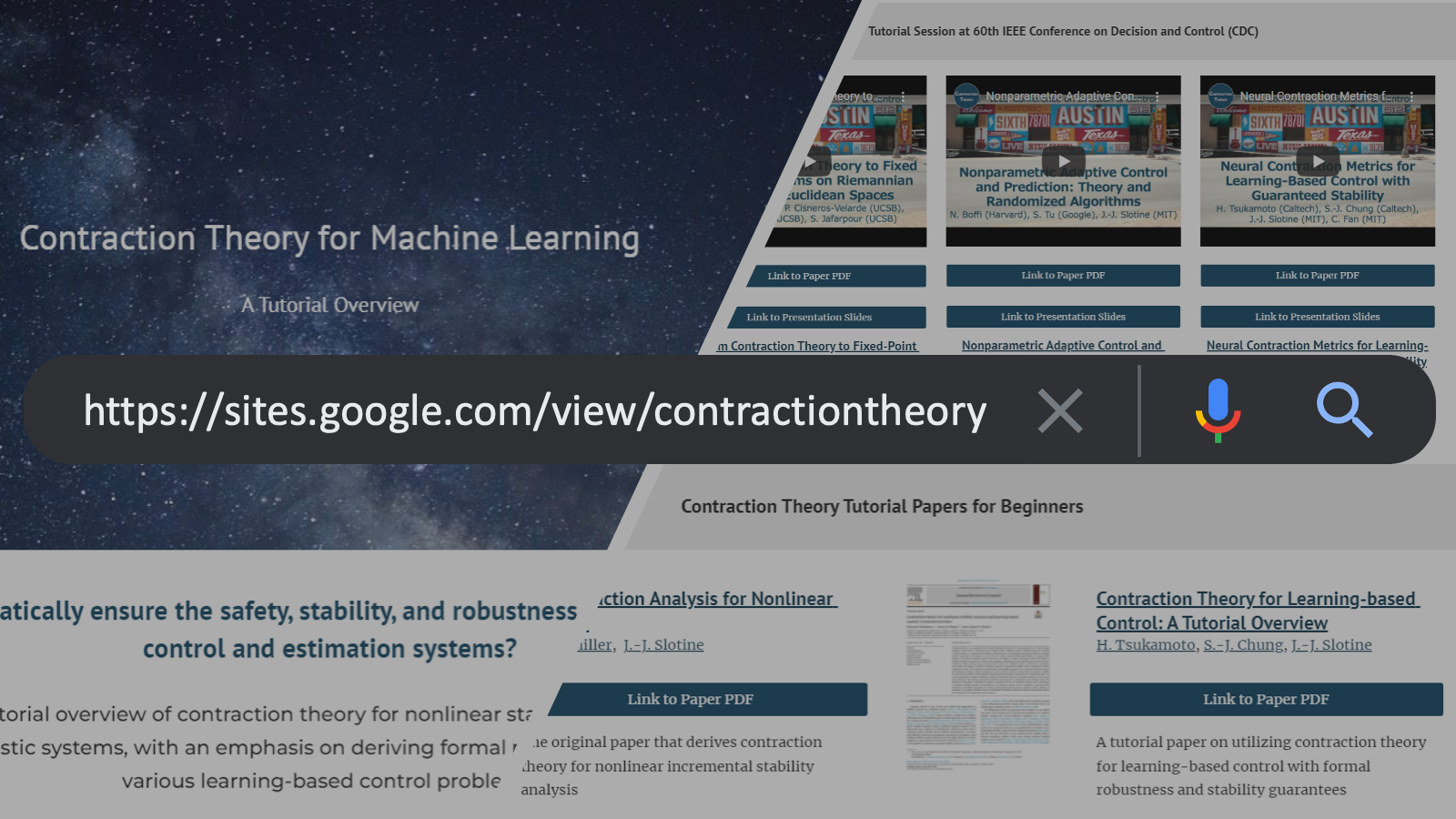
Our Tutorial Website on Contraction Theory
H. Tsukamoto, S.-J. Chung, and J.-J. E. Slotine
G&C OVERVIEW of ISO Exploration
H. Tsukamoto, S.-J. Chung, B. Donitz, M. Ingham, D. Mages, and Y. K. Nakka
(3D Resources: NASA 3D Resources)
Our Tutorial Paper on Contraction Theory
H. Tsukamoto, S.-J. Chung, and J.-J. E. Slotine

OUR AUTONOMY DEMONSTRATION VIDEOS
Autonomous Control, Exploration, Intelligence, and Systems (ACXIS)
(Image Credit: NASA JPL)